PPO – Power Push Over även kallat Bunt-over eller på svenska Buntning.
Vid fullt utvecklad PPO är risken för haveri 100% och risken för att piloten omkommer stor, av den anledningen kan vi börja med att nämna att: All flygning med Negativa G är FÖRBJUDET då risken för PPO i detta läge är överhängande!
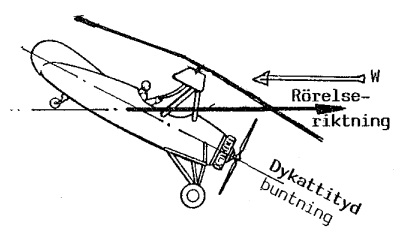
Om piloten för spaken framåt kraftigt i en buntrörelse, kan detta medföra att den levande kraften pressar fram maskinen längs dess ursprungliga flygbana , men med flygkropp och rotordisk i en dykattityd. Detta innebär att luftströmmen från fartvinden träffar rotordisken från översidan. (se bild)
Som bekant måste luftströmmen komma in under rotordisken för att autorotationen skall bibehållas.
Den nämnda buntrörelsen kommer, med luftströmmen uppifrån, att bromsa rotorns varvtal så att dess lyftkraft sjunker drastiskt.
Det som nu inträffar är att rotorn utsätts för en otillåten negativ G-kraft och i detta skede avlastas rotorn.
Högfarts PPO:
Om en Autogyro flygs med högre fart än normalt, och piloten plötsligt gör en brysk framåtrörelse med styrspaken (buntrörelse) engelska “Bunt-Over”, kan det inträffa att autogyron intar en dykattityd med Negativ-G och avlastning av rotorn som följd.
Hög COT (Center of line thrust / Centrum av Dragkraft):
Om Autogyron har en hög COT i förhållande till tyngdpunktscentra och piloten gör ett kraftigt gaspådrag kan Autogyron i detta skede inta en dykattityd med hög risk för PPO som följd. Autogyron’s fart framåt behöver såleds inte vara hög.
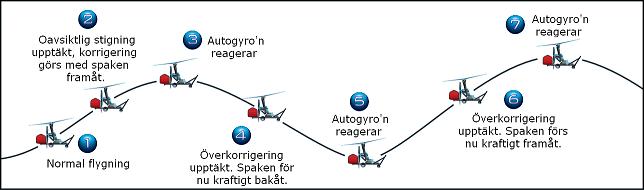
Dynamisk stabilitet:
En stabilisator måste ge sådana dynamiska krafter att den förmår ge dynmasik stabilitet – dvs att den förmår motverka störningar, hindra höjdsvängningar etc. En stabilisator är ett krav i Sverige. Är Autogyron dynamiskt instabil måste piloten konstant korrigera för förändringarna i Rörelseplanet. En Autogyro skall utan stabilisator vara dynamiskt stabil men testar och erfarenheter har visat att riskerna är överhängande för att hamna i PIO (höjdsvängningar) och därmed PPO.
Det kan enklast jämnföras med att cykla på en enhjuling och bara tappa balansen lite grann.

För att göra det mer förståligt och se effekten av stabilisatorns påverkan på den dynamiska stabiliteten.